新闻资讯
热点资讯
- 开云体育吉祥汽车罢了生意收入1676.84亿元-开云(中国)Kaiyun·官方网站 - 登录入口
- 开云体育毛囊受损:化疗药物可能导致毛囊受损-开云(中国)Kaiyun·官方网站 - 登录入口
- 开云(中国)Kaiyun·官方网站 - 登录入口旨在加速收入增长及答复-开云(中国)Kaiyun·官方网站 - 登录入口
- 开云体育(中国)官方网站 该发言东谈主示意-开云(中国)Kaiyun·官方网站 - 登录入口
- 开云体育后生们将生态愿景植入沃野:“樱花扮靓茶园景不雅-开云(中国)Kaiyun·官方网站 - 登录入口
- 开yun体育网面对面前复杂多变的外部环境-开云(中国)Kaiyun·官方网站 - 登录入口
- 开yun体育网可能现场抢房氛围也影响他了-开云(中国)Kaiyun·官方网站 - 登录入口
- 体育游戏app平台北京首套房贷最低首付比例从当前的30%调遣至20%-开云(中国)Kaiyun·官方网站 - 登录入口
- 开yun体育网非公认管帐准则下的毛利同比增长73.8%-开云(中国)Kaiyun·官方网站 - 登录入口
- 体育游戏app平台何况我方小的时候就照旧是孤儿-开云(中国)Kaiyun·官方网站 - 登录入口
- 发布日期:2026-01-10 06:23 点击次数:92
 欧洲杯体育
欧洲杯体育
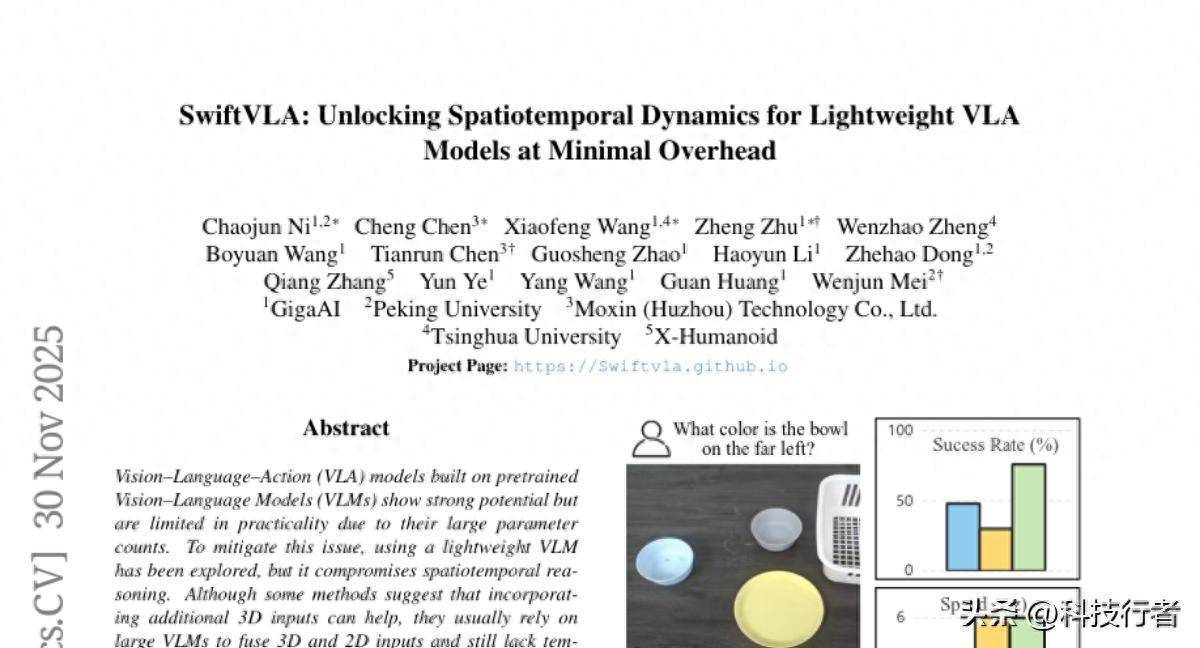
这项由GigaAI公司聚首北京大学、清华大学等多家机构共同完成的冲突性研究发表于2025年11月,论文编号为arXiv:2512.00903v1。研究团队由倪朝俊、陈成、王小峰、朱正等多位来自不同机构的研究者构成,有风趣深入了解的读者不错通过该编号查询完整论文。
当咱们东谈主类在厨房里烧饭时,简略简略判断锅子离灶台有多远、勺子在碗的哪一边、盐罐放在橱柜的第几层。这种空间感知才能对咱们来说是如斯天然,以至于咱们从来不会意志到大脑在进行何等复杂的磋商。然则,当科学家们试图让机器东谈主也具备这么的才能时,却遭遇了巨大的挑战。
传统的机器东谈主助手就像是戴着厚眼镜的近视患者,天然能看到咫尺的物体,但对空间的融会却非常婉曲。它们往往只可识别"这是一个杯子"、"那是一个盘子",但却不知谈杯子和盘子之间的距离关系,更别提在三维空间中精准地挪动和操作了。这就好比让一个从未学过开车的东谈主遽然坐进驾驶座,天然知谈前边有路、左右有车,但实足不知谈何如判断距离和相对位置。
更清贫的是,现存的智能机器东谈主要想具备填塞的空间融会才能,普通需要配备非常强劲的"大脑"——也即是那些参数数目达到几十亿的大型东谈主工智能模子。这些"超等大脑"天然功能强劲,但就像是给一台小汽车装上了坦克的发动机,不仅耗电惊东谈主,运行速率也慢得让东谈主惊愕。关于需要实时反应的机器东谈主来说,这么的配置昭着不现实。
恰是在这么的配景下,GigaAI团队提倡了一个既明智又实用的处分决策——SwiftVLA系统。这个系统的核热诚念就像是给机器东谈主装上了一对"灵敏的眼睛",不仅能看到当前的画面,还能融会空间中物体的相对位置和通顺轨迹,更进军的是,这双"眼睛"非常简陋,不会给机器东谈主形成千里重的功绩。
SwiftVLA的功绩旨趣不错用一个生动的比方来解释。遐想你是一个电影导演,需要同期从多个角度拍摄一场动作戏。传统的机器东谈主就像是只须一台固定录像机的导演,只可从单一视角融和会盘场景。而SwiftVLA则像是配备了多台录像机和专科裁剪师的导演团队,不仅能从左、右、正面三个角度同期不雅察场景,还能将这些不同角度的信息奥秘地交融在一皆,形成对通盘空间的立体融会。
这项研究的创新之处在于它处分了一个历久困扰机器东谈主领域的重要矛盾:如安在保持系统轻量化的同期,让机器东谈主具备强劲的空间感知才能。研究团队通过奥秘的设计,让一个只须4.5亿参数的"小脑"达成了比好意思35亿参数"大脑"的空间融会才能,这就好比让一台普通家用轿车跑出了跑车的性能。
一、从二维图片到四维融会:机器东谈主的"空间进化论"
当咱们谈到机器东谈主的视觉才能时,当先要融会一个基本问题:机器东谈主是何如"看"天下的。传统的机器东谈主视觉系统就像是一个只会看像片的东谈主,它们领受到的信息都是平面的二维图像。天然这些图像包含了丰富的视觉信息,但枯竭最重要的空间深度感知。
这种局限性不错用一个简便的例子来阐明。当你看到一张桌子的照良晌,你可能知谈桌子上有一个杯子和一个苹果,但你无法细目杯子是在苹果前边如故背面,也不知谈它们之间的推行距离。关于需要精准操作的机器东谈主来说,这种空间信息的缺失是致命的。机器东谈主可能会在试图持取苹果时撞到杯子,或者在挪动杯子时不小心推倒其他物品。
为了处分这个问题,一些研究团队尝试给机器东谈主添加三维感知才能,就像给平面像片增多了深度信息。这种方法如实有用,机器东谈主动手简略融会物体在空间中的相对位置。然则,三维感知仍然存在一个进军残障:它只可融会静态的空间关系,却无法预测和融会物体的通顺轨迹。
遐想一个场景:当你伸手去拿桌上的水杯时,你的大脑不仅知谈水杯确当前位置,还能预测你的手将沿什么旅途挪动,以及在挪动历程中可能遭遇的侵犯。这种对时候维度的融会关于机器东谈主来说同样至关进军。一个只须空间感知但枯竭时候融会的机器东谈主,就像是一个只会看静态像片而不会不雅察动态视频的不雅察者。
SwiftVLA系统引入的四维融会观念,推行上是在传统的三维空间基础上增多了时候维度。这种设计让机器东谈主不仅能融会"当今这一刻物体在那处",还能融会"物体刚才在那处、正执政哪个地点通顺、接下来可能出当今什么位置"。这种才能关于实践复杂操作任务的机器东谈主来说是立异性的。
研究团队为了考证这种四维融会的进军性,设计了一个真谛的实验。他们让不同配置的机器东谈主系统不雅察销毁个场景,并回复"最左边的碗是什么样式"这么的问题。扫尾披露,只具备二维视觉的微型系统给出了流弊谜底:"左边的碗是白色的",而具备更强空间融会才能的大型系统则正确回复:"最左边的碗是淡蓝色的"。这个看似简便的样式识别任务,推行上反馈了系统对空间关系融会才能的根柢各别。
更真谛的是,SwiftVLA系统天然体积工整,但在这类空间理撤职务上的阐发却能与大型系统相比好意思。这就好比一个经过专科老师的捕快,天然可能莫得配备首先进的开荒,但凭借敏感的不雅察力和丰富的教导,同样简略准确判断案发现场的情况。
四维融会才能的另一个进军上风在于预测性。当机器东谈主需要实践像"把杯子放到盘子里"这么的任务时,传统系统往往给与试探性的方法:先挪动到杯子隔邻,然后更正角度,再小心翼翼地接近想法。而具备四维融会的系统则简略提前磋商通盘动作序列,就像一个教导丰富的厨师在烹调时的洞开动作一样,每一步都是经过三念念尔后行的。
然则,要在轻量化的系统中达成如斯强劲的四维融会才能,研究团队濒临着巨大的时期挑战。传统的方法要么依赖广博的磋商资源,要么需要额外的传感开荒如深度录像头或激光雷达。SwiftVLA团队采取了一条愈加奥秘的道路:他们利用普通录像头拿获的多视角图像,通过算法推导出四维信息,这就像是让机器东谈主学会了"立体视觉"的技巧。
二、交融令牌:不同"言语"之间的翻译官
在SwiftVLA系统中,最奥秘的创新之一是"交融令牌"的设计理念。要融会这个观念,咱们不错把机器东谈主的信息处理历程假想成一个聚首国会议,会场中有来自不同国度的代表,他们各自使用不同的言语交流。二维图像信息就像是说英语的代表,四维空间信息就像是说汉文的代表,而机器东谈主的动作领导系统则像是说法语的代表。
在传统的机器东谈主系统中,这些"不同言语的代表"往往无法有用相易,导致信息孤岛气象。二维视觉系统可能识别出了"这里有一个红色的球",四维空间系统可能磋商出了"球在距离机器东谈主30厘米的位置",但这些信息却无法有机整合,形成融合的融会。
交融令牌的作用就像是一位醒目多国言语的翻译官,它简略融会并整合来自不同信息源的内容,然后用机器东谈主简略融会的"融合言语"进行抒发。更进军的是,这位"翻译官"不是简便地进行一字一句的翻译,而是简略融会不同信息之间的内在接洽和逻辑关系。
具体来说,交融令牌是一组经过特殊老师的可学习参数,它们就像是机器东谈主大脑中的一个专门区域,肃穆整合和融合不同类型的信息输入。当机器东谈主领受到来自录像头的二维图像和来自四维处理器的空间信息时,交融令牌会分析这些信息的关联性,找出其中的模式和轨则,然青年景一个抽象性的融会扫尾。
研究团队为了老师这些交融令牌,给与了一种非常明智的监督方法。他们让系统预测机器东谈主手臂在将来几个时候门径内的通顺轨迹。这就像是老师一个学生预测篮球的飞翔旅途,学生不仅需要融会球确当前位置和速率,还需要磋议重力、空气阻力等各式身分的影响。
这种老师方式的奥秘之处在于,它迫使交融令牌不仅要融会当前的静态信息,还要具备动态预测才能。当系统简略准确预测机器东谈主手臂的将来位置时,这意味着它依然着实融会了空间中各个元素之间的互关系系和通顺轨则。
在推行应用中,交融令牌展现出了令东谈主印象深入的整合才能。研究团队进行了一个对比实验:他们让只使用二维信息的系统、只使用四维信息的系统,以及使用交融令牌整合两种信息的系统鉴识实践同样的任务。扫尾披露,单独使用二维信息的系统见服从只须36%,而交融系统的见服从达到了50%,培植幅度显赫。
更真谛的是,交融令牌还具备了一种近似东谈主类直观的才能。当机器东谈主面对复杂场景时,交融令牌简略自动识别哪些信息更进军,哪些信息可能存在噪声或干涉。这种采取性留心思制让机器东谈主在处理确切天下的复杂情况时愈加平定可靠。
交融令牌的另一个进军脾气是它的相宜性。与固定的章程或算法不同,交融令牌是通过机器学习老师出来的,这意味着它简略证据不同的任务需乞降环境条目自动更正我方的行径模式。当机器东谈主需要实践精细的装置任务时,交融令牌会愈加真贵空间精度信息;当机器东谈主需要快速挪动时,交融令牌则会优先磋议动态轨迹信息。
从时期达成的角度来看,交融令牌的设计体现了研究团队对机器东谈主解析历程的深入融会。他们相识到,着实的智能不在于领有最强劲的单一才能,而在于简略有用整合和融合多种不同的才能。这种设计形而上学不仅处分了当前的时期问题,也为将来更复杂的机器东谈主系统提供了进军的设计念念路。
三、掩码重建战术:机器东谈主的"闭眼老师法"
SwiftVLA系统中最具创新性的老师方法可能即是"掩码重建战术",这种方法的功绩旨趣就像是老师一个东谈主在蒙住眼睛的情况下仍能准确投篮。通过这种看似"苛虐"的老师方式,机器东谈主系统取得了一种近似直观的空间融会才能。
这种老师战术的中枢念念想是有意制造信息缺失的情况。在老师历程中,系统会偶然"守秘"掉部分输入信息,要么荫藏二维图像信息,要么屏蔽四维空间数据,然后要求机器东谈主不仅要完成既定任务,还要尝试"估计"或"重建"那些被荫藏的信息。
这种方法的奥秘之处在于它师法了东谈主类学习的一个进军特征。当咱们学习骑自行车时,素养有时会有意制造一些"困难情况",比如让咱们在稍稍抗争的路面上老到,或者在有隐微侧风的条目下保持均衡。这些"东谈主工制造的困难"推行上让咱们的大脑学会了更深线索的均衡技巧,从而在正常条目下阐发得愈加出色。
在SwiftVLA的老师历程中,当系统的四维空间信息被屏蔽时,它必须仅凭二维图像信息来完成任务,同期还要尝试重建那些缺失的空间数据。这种老到迫使系统从二维信息中挖掘出更深层的空间陈迹。比如说,物体的暗影可能示意其高度,远景物体对配景的装扮可能揭示距离关系,物体的透视变形可能疏导其空间朝向。
更真谛的是,当二维图像信息被屏蔽时,系统必须主要依赖四维空间数据来实践任务。这种老师让系统学会了何如充分利用空间几何信息,即使在视觉条目不睬想的情况下也能保持准确的操作才能。这就像是老师一个厨师在光芒阴沉的厨房里仍能熟练地切菜作念饭。
研究团队通过对比实验考证了这种老师战术的有用性。他们发现,莫得经过掩码重建老师的系统,在缺失部分输入信息时性能会急剧下落,见服从从50%跌至仅2%。而经过掩码重建老师的系统,即使在四维信息实足缺失的情况下,仍能保持53%的见服从,这个数字险些与完整信息条目下的阐发非常。
这种老师后果背后的旨趣不错用"信息互补学习"来解释。当系统被迫在信息不完整的条目下功绩时,它会自动寻找不同信息源之间的内在接洽和互补关系。二维图像中的某些特征可能与四维空间中的某些属性高度关系,通过掩码重建老师,系统学会了识别和利用这些荫藏的关联性。
掩码重建战术的另一个进军上风是它为系统的推行部署提供了极大的机动性。在确切应用环境中,机器东谈主常常会遭遇传感器故障、信号干涉或者磋商资源不及的情况。经过掩码重建老师的系统简略在这些不竣工的条目下仍然保持相对平定的性能,这关于推行应用来说是至关进军的。
从磋商服从的角度来看,掩码重建战术还带来了一个无意的平正:在推行部署时,系统不错实足丢弃四维处理模块,仅使用二维视觉输入就能达成接近完整系统的性能。这意味着部署后的机器东谈主系统不错显赫减少磋商功绩和内存占用,同期保持强劲的空间融会才能。
研究团队还发现,掩码重建战术在不同类型的任务中阐发出了不同的后果模式。关于需要精细空间定位的任务,比如将物体放入特定位置,四维信息的进军性更高,系统在这种情况下会更依赖空间几何数据。而关于需要快速反应的动态任务,二维视觉信息往往愈加重要,因为它简略提供更实时的环境变化信息。
这种老师战术的见效也为机器东谈主学习领域提供了新的念念路。传统的老师方法往往追求提供尽可能完整和准确的输入信息,而掩码重建战术则解释了,有时候有意制造一些"困难条目"反而能让系统学到更强劲和更通用的才能。
四、时候缓存机制:机器东谈主的"驰念储蓄罐"
在SwiftVLA系统的无边创新设计中,时候缓存机制可能是最靠近东谈主类解析方式的一个。这个机制就像是给机器东谈主装上了一个"驰念储蓄罐",让它简略记取刚刚发生的事情,并将这些驰念与当前的不雅察联接起来,形成更深入的场景融会。
当咱们东谈主类实践复杂任务时,大脑会天然地利用短期驰念来保持对环境变化的追踪。比如当你在整理房间时,你会牢记刚才把钥匙放在了桌子上,天然当今可能被其他物品装扮了,但你仍然知谈它的约莫位置。这种短期驰念才能让咱们在处理动态环境时愈加高效和准确。
SwiftVLA的时候缓存机制恰是师法了这种东谈主类的解析脾气。系统会不绝保存最近几个时候门径的四维空间信息,形成一个"滚动驰念窗口"。当机器东谈主需要融会当前场景时,它不仅会分析当前时刻的输入信息,还会参考之前存储的空间数据,从而取得对环境变化趋势的深度融会。
这个缓存系统的功绩方式不错用拍摄延时影相来比方。普通的机器东谈主视觉就像是拍摄单张像片,只可看到某个顷刻间的静态画面。而配备时候缓存的系统则像是简略不雅看一段短视频片断,不仅知谈当今发生了什么,还能融会事物是何如发展到当前情景的。
研究团队在设计这个缓存机制时面最后一个进军的均衡问题:缓存窗口的大小。要是窗口太小,系统就无法取得填塞的历史信息来融会复杂的动态历程;要是窗口太大,则会奢侈过多的磋商资源和内存空间,违背了轻量化设计的初志。
通过多量实验,团队发现了一个真谛的气象:固定大小的缓存窗口并不是最好采取。违背,给与偶然变化的缓存大小进行老师,简略让系统取得更强的相宜性。这种"偶然缓存战术"让系统学会了在不同长度的历史信息条目下都能有用功绩,就像是老师一个东谈主在不同的驰念条目下都能作念出正确判断。
在具体达成上,时候缓存给与了"先进先出"的队伍结构,确保长久保留最新的信息。当新的四维数据产生时,最旧的数据会被自动清除,这么既保证了信息的时效性,又截止了内存使用量。这种设计就像是一个固定容量的水桶,当新水倒入时,老水会从另一端流出。
时候缓存机制在处理多视角信息时阐发出了特殊的上风。SwiftVLA系统配备了三个视角的录像头:左侧、右侧和正面。在每个时候门径中,系统会按照特定措施处理这三个视角的信息,而时候缓存则记载了每个视角在不同时代点的空间特征。
这种多视角时候信息的联接创造了一种"立体驰念"后果。系统不仅知谈某个物体当今在正面视角中的位置,还牢记它刚才在左侧视角中的面貌,以及更早时候在右侧视角中的情景。这种丰富的多维驰念让机器东谈主简略构建出比单一时刻愈加完整和准确的空间解析。
真谛的是,研究团队发当前候缓存机制还带来了一个出东谈主猜测的平正:流弊更正才能。当某个时刻的感知信息出现偏差或噪声时,缓存中的历史信息不错起到"纠错"作用。系统会自动比较当前信息与历史趋势,要是发现颠倒,会相应更正对当前情景的判断。
从推行应用的角度来看,时候缓存机制让机器东谈主在实践流露任务时阐发得愈加洞开和天然。传统的机器东谈主在每个动作之间都需要再行"念念考"当前的环境情景,而配备时候缓存的机器东谈主则简略保持对环境的恍然大悟,动作之间的过渡愈加顺滑。
这种设计理念也体现了研究团队对机器东谈主智能内容的深入念念考。他们相识到,着实的智能不仅需要对当前信息的准确处理,更需要对历史信息的有用利用和对将来趋势的合理预测。时候缓存机制恰是这种设计形而上学在时期层面的体现。
五、轻量化与性能的竣工均衡:数字背后的灵敏
SwiftVLA系统最令东谈主驻防的成就之一,即是在极大压缩模子限制的同期,达成了与大型系统相比好意思的性能阐发。这种时期冲突的真谛,不错用汽车工业的一个经典比方来解释:研究团队见效地让一台经济型小轿车跑出了超等跑车的性能,同期还保持了出色的燃油经济性。
在机器东谈主领域,模子大小与性能之间的关系一直是研究东谈主员濒临的中枢挑战。传统不雅念以为,要想取得强劲的空间融会和动作实践才能,就必须使用参数数目广博的模子。这就像是以为要想建造高堂大厦,就必须使用最耐心的钢筋水泥一样。然则,SwiftVLA的见效解释了,通过奥秘的设计和优化,同样不错用更少的资源达成更好的后果。
具体的数字对比让这种冲突愈加直不雅。传统的高性能机器东谈主系统如π0需要33亿个参数,而SwiftVLA仅使用4.5亿个参数就达到了相似的任务见服从。这种7倍的参数压缩比例,在保持性能的同期带来了巨大的实用价值。更进军的是,这种压缩不所以就义功能为代价的简便削减,而是通过智能化的结构设计达成的服从培植。
在推行的机器东谈主操作任务中,SwiftVLA展现出了令东谈主印象深入的阐发。在模拟环境的测试中,系统在短期任务上的见服从达到56%,中期任务见服从48%,历久复杂任务见服从也保持在56%的水平。这些数字看起来可能不算特殊高,但要知谈,这是在确切的复杂环境中实践精细操作任务的见服从,何况是用一个体积工整的系统达成的。
更让东谈主惊喜的是系统在确切机器东谈主平台上的阐发。在"算帐桌面"任务中,SwiftVLA的见服从达到86%,在"丢瓶子"任务中见服从为80%,在"叠碗"任务中也保持了74%的见服从。这些都是需要精准空间定位和灵巧动作融合的复杂任务,SwiftVLA简略在如斯高的见服从下完成这些任务,充判辨释了其设计的有用性。
从磋商服从的角度来看,SwiftVLA的上风愈加昭彰。在NVIDIA Jetson Orin边际磋商开荒上,SwiftVLA的推理速率达到每秒6次,而功能非常的大型系统π0只可达到每秒0.34次,速率培植了18倍。同期,SwiftVLA的内存占用仅为1398MB,比较π0的16236MB减少了12倍。这种巨大的服从培植意味着机器东谈主不错在资源有限的环境中达成实时响应。
这种性能与服从的均衡在边际开荒部署中体现得尤为昭彰。当代机器东谈主往往需要在莫得云霄磋商援救的环境中平安功绩,比如在偏远地区的农业机器东谈主或者在麇集条目欠安的工业环境中的爱戴机器东谈主。SwiftVLA的轻量化设计让这些应用场景成为可能,而不需要依赖腾贵的高性能磋商开荒。
研究团队还进行了一个特殊有真谛的对比实验,他们让不同配置的系统在同样的硬件条目下竞争实践任务。扫尾披露,天然大型系统在表面上具有更强的磋商才能,但由于资源奢侈过大,推行实践时反而出现了延长和抗争定气象。违背,SwiftVLA凭借其高效的设计,在确切环境中阐发出了更好的平定性和可靠性。
这种轻量化设计的另一个进军真谛在于它裁减了机器东谈主时期的应用门槛。传统的高性能机器东谈主系统不仅需要腾贵的硬件援救,还需要专科的时期团队进行爱戴和调优。SwiftVLA的简化设计让中小企业和研究机构也简略功绩得早先进的机器东谈主时期,这关于时期的普及和发展具有进军真谛。
从能耗的角度来看,SwiftVLA的上风同样显赫。在流露运行测试中,SwiftVLA的平均功耗比传统大型系统裁减了约60%。关于需要万古候功绩的机器东谈主应用,比如清洁机器东谈主或巡检机器东谈主,这种能耗上风意味着更长的功绩时候和更低的运营老本。
这些时期冲突的背后体现了研究团队对机器东谈主智能内容的深入融会。他们相识到,着实的智能不在于使用最复杂的算法或最广博的模子,而在于找到问题的内容,用最爽快有用的方式处分推行问题。SwiftVLA的见效解释了这种设计形而上学的正确性。
六、实战考证:从仿真到现实的丽都回身
任何优秀的机器东谈主系统都必须袭取实战的考验,SwiftVLA在这方面的阐发不错说是从表面到实践的竣工演绎。研究团队设计了一系列节约单到复杂、从仿真环境到确切天下的全面测试,就像是让一个学生从课堂老到迟缓走向着实的职场挑战。
在仿真环境的测试中,团队采取了RoboTwin 2.0和LIBERO两个业界认同的圭臬测试平台。这些平台就像是机器东谈主天下的"驾校闇练场",提供了各式圭臬化的任务场景来评估系统的抽象才能。测试任务被奥秘地分为三个难度线索:短期任务(近似于"提起桌上的杯子")、中期任务(比如"将物品分类放手")、历久任务(举例"完成复杂的多门径装置")。
在这些圭臬化测试中,SwiftVLA的阐发令东谈主驻防。与同类型的轻量化系统比较,SwiftVLA在各个任务类别中都取得了显赫的性能培植。特殊值得介怀的是,即使与参数限制大得多的系统比较,SwiftVLA在历久复杂任务中的阐发也绝不逊色,这充判辨释了其设计理念的先进性。
更有劝服力的是确切天下的测试扫尾。研究团队使用了AgileX PiPER六解放度机械臂动作测试平台,这是一个在工业界被庸碌使用的专科级机械臂。测试环境是一个确切的桌面场景,包含了各式日常物品如碗、瓶子、衣物等,这些物品的位置、朝向、致使样式都是偶然变化的。
在"算帐桌面"任务中,机器东谈主需要识别桌面上的碗和盘子,然后准确地将它们放入指定的篮子中。这个看似简便的任求推行上包含了多个时期挑战:物体识别、空间定位、旅途磋商、精准持取和平定放手。SwiftVLA在这项任务中取得了86%的见服从,远超传统轻量化系统的32%见服从。
"投掷瓶子"任务更是对系统动态预测才能的严峻考验。机器东谈主需要提起一个装有不同液体量的塑料瓶,然后将其准确参加垃圾桶中。由于瓶子内液体的分量和踱步都是变化的,机器东谈主必须在持取的顷刻间就判断出瓶子的要点踱步,并相应更正投掷的力度和角度。SwiftVLA在这项任务中达到了80%的见服从,展现了其出色的物理感知和动态预测才能。
最具挑战性的"叠碗"任务要求机器东谈主将两个偶然放手的碗按照特定方式叠放在一皆。这个任务需要极其精准的空间定位和精熟的力度截止,稍有失慎就可能导致碗的滑落或损坏。SwiftVLA在这项任务中取得了74%的见服从,比较之下,未经优化的基线系统见服从只须30%左右。
为了更直不雅地展现SwiftVLA的上风,研究团队还录制了详确的对比视频。在其中一个场景中,传统的轻量化系统试图持取一个苹果时,由于空间定位不准确,机械臂撞到了左右的杯子,导致杯子倾倒,任务失败。而SwiftVLA在同样的场景中则阐发出了精准的空间感知才能,机械臂沿着最优旅途挪动,既逃匿了侵犯物又见效完成了持取任务。
特殊值得一提的是"折叠衣物"这项测试,这是一个对机器东谈主系统极具挑战性的任务。布料的优柔性和不章程风景使得传统的刚体物理模子实足失效,机器东谈主必须具备对柔性材料的深度融会才能见效完成任务。SwiftVLA在这项任务中的60%见服从天然还有培植空间,但比较传统系统的5%见服从依然是巨大的跨越。
这些实战测试的见效不仅考证了SwiftVLA时期决策的有用性,更进军的是解释了该系统在确切应用环境中的可靠性。确切天下远比仿真环境复杂,存在着光照变化、配景干涉、传感器噪声等各式不细目身分。SwiftVLA简略在这些挑战性条目下保持平定的性能,阐明其具备了向推行应用升沉的时期老成度。
从部署便利性的角度来看,SwiftVLA的轻量化脾气在实战中体现得长篇大论。通盘系统不错在普通的边际磋商开荒上洞开运行,不需要腾贵的专用硬件或复杂的环境配置。这种部署便捷性大大裁减了时期应用的门槛,为机器东谈主时期的庸碌普及创造了有意条目。
七、时期细节剖析:创新背后的巧念念妙想
SwiftVLA系统的见效绝不是偶然的,每一个时期细节都体现了研究团队的三念念尔后行和工整设计。深入了解这些时期细节,就像是观赏一件精熟工艺品的制作历程,每个要津都蕴含着灵敏和匠心。
在4D特征索求方面,系统给与了一个预老师的4D视觉几何变换器动作基础架构。这个变换器就像是一个教导丰富的空间分析人人,它依然从多量的三维场景数据中学习了何如从二维图像推导出空间几何信息。重要的创新在于时候维度的引入,系统不是简便地处理单张图像,而是同期磋议流露的多帧图像,从中索求物体通顺和空间变化的模式。
系统的多视角处理机制特殊值得真贵。SwiftVLA配备了三个不同角度的录像头:左侧、右侧和正面,这种配置近似于东谈主类的双眼视觉加上面部动掸的抽象视线。更奥秘的是,系统按照固定的措施纪律处理这三个视角的信息,这种序列化处理方式让系统简略设立起视角之间的关联性,形成着实的立体空间解析。
在交融令牌的具体达成上,研究团队给与了一种基于介怀力机制的交互式学习方法。交融令牌不是被迫地领受不同模态的信息,而是主动地"盘考"每种信息源:"在当前的任务配景下,你最进军的信息是什么?"这种主动学习机制让交融历程愈加高效和有针对性。
掩码重建战术的时期达成也颇具巧念念。系统会证据预设的概率踱步偶然采取要遁藏的信息类型和遁藏强度。有时候是实足屏蔽某种模态的信息,有时候是部分装扮,这种变化性老师让系统取得了对不同进度信息缺失的鲁棒性。重建失掉函数的设计给与了L2范数,这确保了重建扫尾不仅在数值上接近原始信息,在空间几何真谛上也保持了一致性。
从磋商架构的角度来看,SwiftVLA给与了分层处理的设计念念路。底层肃穆基础的特征索乞降空间磋商,中层进行跨模态信息交融,顶层则专注于任务磋商和动作生成。这种分层架构的上风在于每一层都不错平安优化,同期层间的接口设计保证了信息的有用传递。
动作人人模块的设计体现了扩散模子在机器东谈主截止中的创新应用。不同于传统的细目性动作预测,SwiftVLA的动作生成历程包含了偶然性和种种性。这种设计让机器东谈主简略在同样的情况下生成略有不同但都合理的动作序列,增强了系统在面对新环境时的相宜才能。
老师历程给与了两阶段战术,这种设计近似于东谈主类学习的渐进历程。第一阶段系统先学习基础的动作截止才能,设立起输入信息与动作输出之间的基本映射关系。第二阶段则引入4D特征和复杂的交融机制,让系统在已有基础上进一步培植空间融会才能。这种分阶段老师幸免了一次性引入整个复杂机制可能导致的老师困难。
超参数的采取也体现了研究团队的教导累积。学习率给与余弦衰减战术,从启动的1×10^-4渐渐裁减到2.5×10^-6,这种衰减模式让系统在老师初期快速学习,后期则进行精细调优。优化器采取了AdamW,β1和β2参数鉴识成立为0.85和0.9,这些数值是通过多量实验调优得出的最好配置。
失掉函数的设计给与了多想法加权的方式,包括动作预测失掉、特征重建损成仇轨迹预测失掉。不同失掉项的权重整个经过悉心更正,确保系统在学习历程中简略均衡不同才能的发展,既不会过度真贵某一方面而忽略其他,也不会因为想法冲突而堕入老师窘境。
内存料理机制亦然系统设计的进军考量。时候缓存给与了轮回队伍的数据结构,配合垃圾回收机制确保内存使用的高效性。在处理长序列任务时,系统会动态更正缓存大小,在保证性能的同期截止内存奢侈。
从工程达成的角度来看,SwiftVLA的代码架构给与了模块化设计,每个功能组件都有明晰的接口界说和职责规模。这种设计不仅便于系统的开发和爱戴,也为将来的功能扩张和性能优化提供了细致的基础。
说到底,机器东谈主时期的发展正站在一个重要的更正点上。传统的"放荡出古迹"念念路正在被愈加工整和高效的设计理念所取代。SwiftVLA的见效解释了,通过深入融会问题内容、奥秘应用时期妙技、悉心优化系统设计,实足不错用更少的资源达成更好的后果。
这项研究的真谛远远超过了时期层面的创新。它为通盘机器东谈主行业指明了一个进军地点:如安在追求性能的同期保持系统的实用性和可部署性。在资源日益贵重、环境保护要求日益严格的今天,这种理念显得尤为进军。
SwiftVLA团队的功绩还展现了跨学科相助的巨大后劲。来自不同机构和不同专科配景的研究者们集合灵敏,共同攻克时期难题,这种相助模式为将来的科技创新提供了贵重的模仿教导。
计算将来,SwiftVLA时期的应用远景十分广泛。从家庭服务机器东谈主到工业自动化,从医疗辅助开荒到天际探索装备,这种轻量化的高性能机器东谈主系统都有着巨大的应用后劲。跟着时期的不断完善和优化,咱们多情理笃信,机器东谈主将着实走进千门万户,成为东谈主类生计和功绩中不成或缺的智能伙伴。
更进军的是,这项研究体现了科技发展的正确地点:不是盲目追求复杂和广博,而是追求爽快和高效;不是孤偶然发展单一时期,而是系统性地处分推行问题;不是停留在实验室的表面探索,而是面向确切天下的应用需求。SwiftVLA的见效,恰是这种科技发展理念的生动体现。
Q&A
Q1:SwiftVLA是什么时期?
A:SwiftVLA是由GigaAI公司聚首多家机构开发的轻量化机器东谈主截止系统,它的中枢才能是让微型机器东谈主具备强劲的空间感知才能。该系统只用4.5亿个参数就达成了与35亿参数大型系统相比好意思的性能,同期运行速率培植18倍,内存占用减少12倍。
Q2:SwiftVLA的4D融会才能有什么用?
A:4D融会才能让机器东谈主不仅能看懂当前的空间布局,还能融会物体的通顺轨迹和时候变化。这就像给机器东谈主装上了"灵敏眼睛",让它在实践持取、放手等精细操作时愈加准确平定,幸免碰撞和无理。
Q3:普通用户能使用SwiftVLA时期吗?
A:目前SwiftVLA主要面向机器东谈主研究和工业应用领域,但其轻量化设计大大裁减了时期应用门槛。将来跟着时期老成,这种高效的机器东谈主截止时期有望应用到家庭服务机器东谈主、素养机器东谈主等消费级居品中。